From 2019 to 2022 I served as the Lead Mechanical Engineer for a vertical farming company OnePointOne. My role was focused on the design, analysis, manufacturing, validation, and verification, of the robotic systems used to automate vertical plane aeroponic systems. I help lead, as well as directly contributed to the development of the robotic gantry system via the drive train, direction shift, winch, and module acquisition sub-systems, as well as oversaw the development of power management, coarse and fine positional telemetry, gantry rails, and root containment subsystems.
I provided technical guidance across the organization on the design of robust automation machinery, creative design topology, and fundamental engineering principles which lead to significant improvements with each project iteration across the organization. I also helped drive expansion of the engineering organization from a small number of newly graduated engineers to a 20+ multi-level interdisciplinary engineering team.
This is a picture of the farm management robot that I lead the design of. The purpose of the robot is to transport seedlings into, and adult plants out of the grow chambers. Grow Chambers consist of a sealed root zone that sprays a nutrient mist onto plant roots, and a shoot zone where plants grow, which receives a photosynthetically optimized light profile from custom LEDs in the chamber. The robot runs on an X-Y gantry track, allowing it to move to any predesignated "node" within the farm to perform operations. To accomplish multi axis motion, the robot possesses two sets of four wheels, all powered; one set for the X direction and one set for the Y direction, with one set being able to move vertically to protrude beyond the other set, or retract above it. Seen here, the robot is holding two grow modules with plants in them. These modules are lifted and lowered into the chambers via a winch with a module acquisition device on the end.
The winch drums are 3D printed to achieve complex geometry for low cost at low production run volumes. The grooves on the drum are specifically shaped to allow clean dual layer spooling of cable without external cable management. The cable is a 10 conductor continuous flex rated, braided stainless steel shielded, combination data and power cable. The cable is not rated to be load bearing, so through internal testing we demonstrated no loss in signal fidelity over the course of 500,000 cycles at 4X the rated load of the robot. This animation is from the initial testing.
This is a wide angle view of the winch test setup, testing the service life of the sub assembly including motors, gears, and cables.
This animation shows the second version of the robot undergoing localization firmware testing on a ground level test track outside the farm. Shows here is the newly updated battery system and power management, as well as newly updated communication and control boards and cases.
This is an animation of the winch and module acquisition system installed on the second version of the robot, picking up an empty module (weighted to simulated plants). The module acquisition system included: independently actuated bi-lateral grippers, each with state feedback based on on inductive sensors, hall effect module position sensing to determine when modules make contact with an object beneath them, and a control box housing a micro controller for real time operation independent from the main robot.
I’m a huge fan of table top role playing games, and one of the fun aspects of the games and the nerd culture in general is collecting dice. Shortly after leaving Ekso Bionics, I conceived of a device that could be any dice the user could ever want, I called it BIG 20. Part Magic 8 ball, part 90s cell phone, part OG dungeon master, BIG 20 is a digital dice roller in the shape of a 20 sided die, and is capable of randomizing anything you could ever want in beautiful color animations. I spent a year working on it, obsessively trying to get it consumer ready, before launching a Kickstarter in August of 2018. Unfortunately, the Kickstarter failed miserably. I can’t put my finger on exactly why. Maybe people weren’t confident that it was developed enough. Maybe it cost too much for what it was. Maybe social media marketing is a fickle mistress. Maybe it was a lot of things that I’m still trying to make sense of. Whatever the reason, my team and I put blood sweat and tears into the project, and it would be a shame to not capture it and show it off.
This is one incarnation of our logo. The Red hex represents the silhouette of an icosahedron, while the central circle represents the viewing window on our device, a window into the future. The text is a slightly modified overpass bold, with the angles tilted to match the angles of the hex. Designed by the incredibly talented Alex Chen, his other work can be found here.
This is our promotional video. Believe it or not, this whole thing was filmed on a Pixel 2, in my garage and kitchen. Its incredible what you can do with a $100 lighting kit from amazon, and some professional editing software! This was the centerpiece of our kickstarter campaign, which can be found here.
This is the pre-production version of BIG 20 and the version we were proposing on selling to our Kickstarter Supporters. What Follows hereafter is a bit of a chronology of the development process. I wanted to show off my talented teammates above, but below everything is from me. Mechanical development, electrical development, firmware development, and software development were all me.
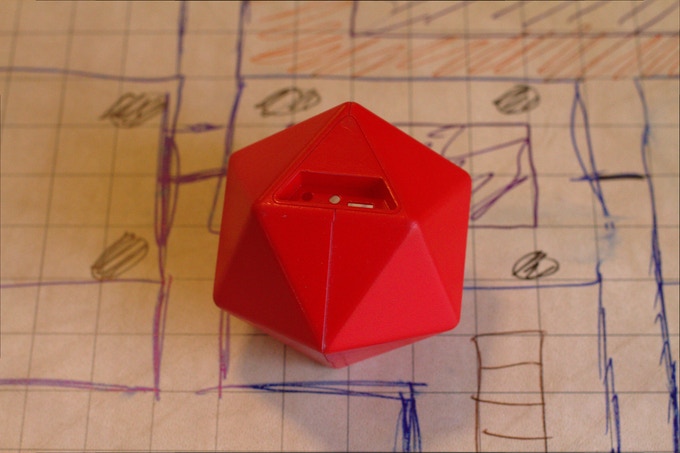
This is the original BIG 20. It was roughly the size of a soccer ball, the screen bolted in, and it ran on a Raspberry Pi 3. It has now been cannibalized for parts, but the shell remains as a reminder to the first step we took towards making the device.
The Case was held together with pins, and you can see here that we broke one of the posts that held the board. This first BIG 20 was printed on a makerbot 3D printer at Method design in San Francisco (Thanks David!). This device was just a project that I was working on for fun, but all my friends loved it, and it inspired me to turn it into an actual product.
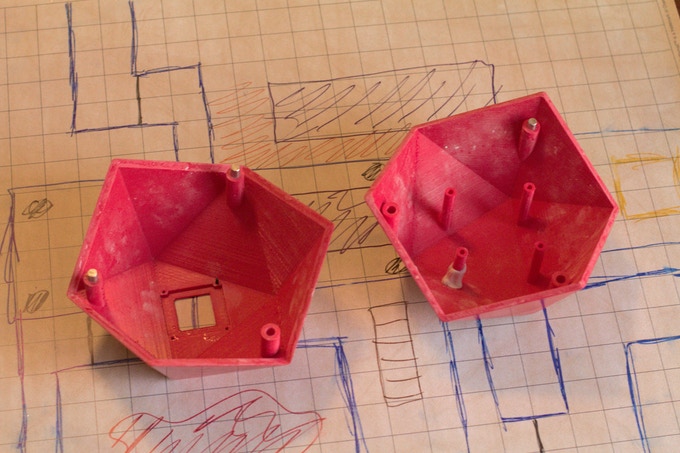
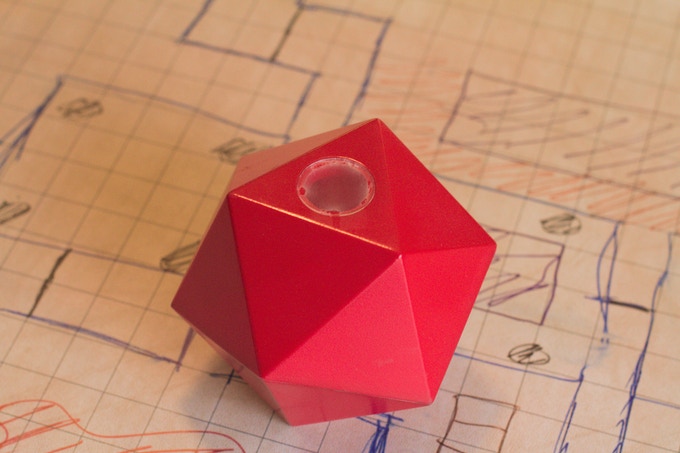
This is the second revision of the BIG 20 case. It was printed at Star Rapid (Thanks guys!) on a stereolithography printer, with an ABS-like material. It measures roughly 5" from side to side, and was intended as a fit-feel-function prototype. You can see the cloudiness of the window. we originally planned to super-glue the window into the case, but we found out that super-glue attacks acrylic. We messed up some dimensions, so the circuit board and screen wouldn't fit inside (oops!). The case was sacrificed to test how well the material would stand up to epoxy.
The plan for this design was to bolt it together, hence the three holes on the base. We ended up not going with this design because A: it doesn't look all that great, and B: those holes go awful deep, and they were driving up the price of the injection molds.
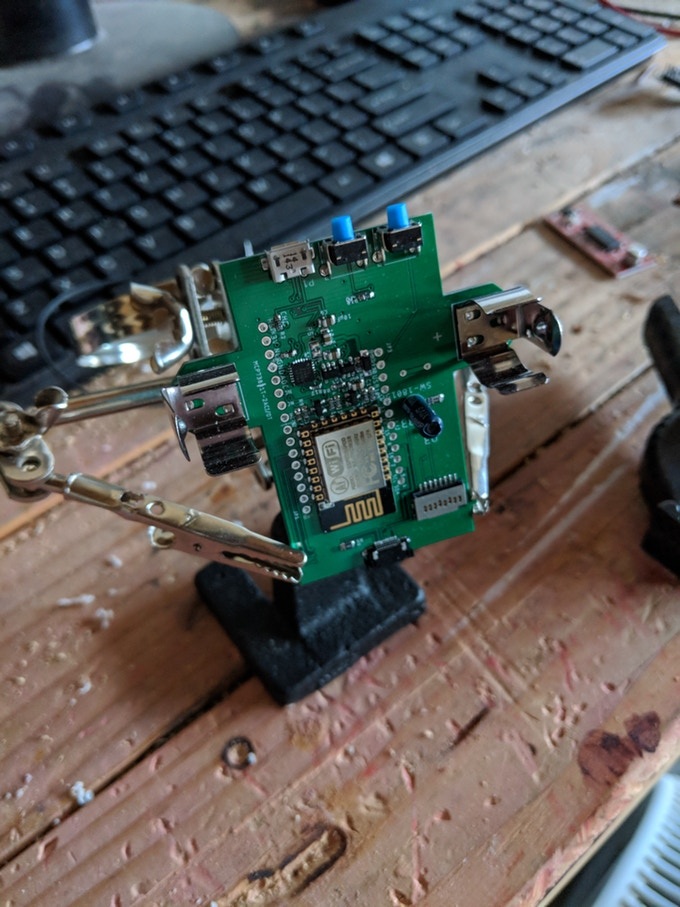
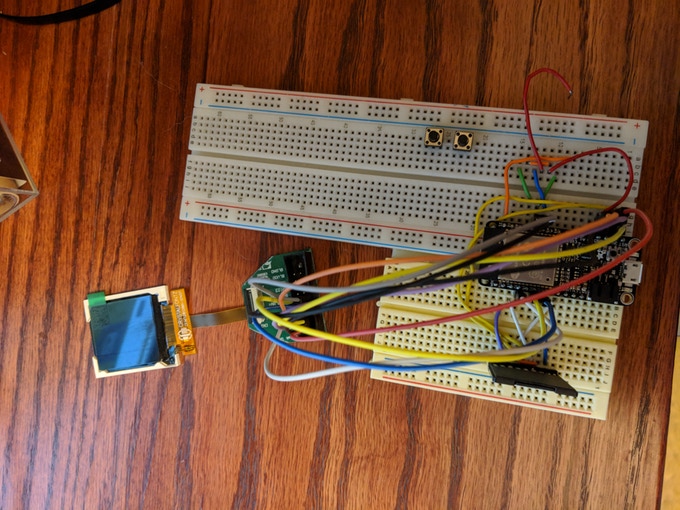
This is the original circuit board that I designed and had manufactured. It's based heavily on on the Feather Huzzah ESP8266 by Adafruit Industries (which can be fond here: https://www.adafruit.com/product/2821 ). It's got 2 buttons, a micro SD card slot, a 10 pin ZIF connector, a shake switch, and a battery plug. This was the first circuit board I had ever built, so even though basing it on open source hardware helped me immensely, I was nervous when I hit the purchase button. It ended up working great, but I didn't exactly like the way the battery wasn't attached to the board. My original intent was customizing the device content via wifi, but this proved to be clunky in testing, so later revisions updated the core chip to allow for bluetooth. This board was manufactured by PCBway.com
This is a case concept I toyed around with to try and drive down the cost of molds. it has a top panel and a bottom panel, and the two sides of the case are identical one another. The window snaps into the top panel. Again, this was printed by Star Rapid.
Bottom side of the same case.
Two identical case sides that fit together.
This is the second revision of the circuit board. The only change is this one holds the battery, instead of just having a plug.
This is the demonstration prototype. 3.5" from side to side, roughly 1 pound, and very close to what our final product would have looked like. It was printed at Star Rapid, and uses the same circuit board as the previous revision.
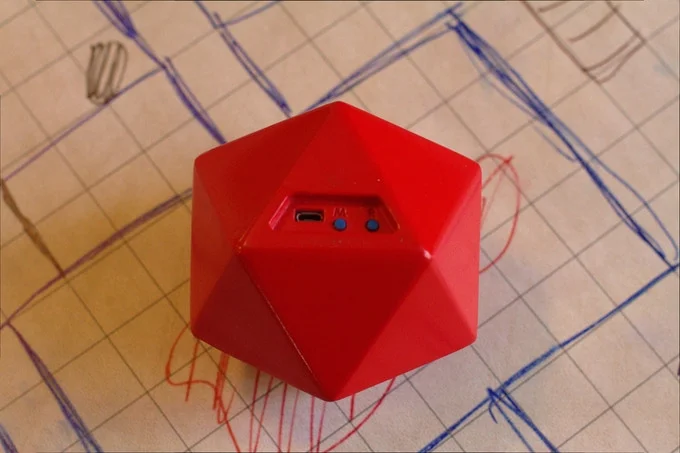
The back side. Reset button, mode button, and charge port. This prototype is epoxied together because I hadn't taken the time to develop snap fits yet.
Some of the other colors we produced for units we sent out to influencers in the hopes of getting the word out.
These are all the marketing prototypes, ready to be painted.
A close up shot of the marketing prototypes
Marketing prototypes, post painting.
PCBs for the marketing prototypes, and the screen that BIG 20 uses to display results.
This was the final version of the board to run on an ESP8266, and was featured in all of the marketing prototypes
Prototyping for the next revision of boards, which run on an ESP32
This is the fleshed out version of the final board. It features an ESP32 microcontroller, on board storage, on board battery, two control buttons, a shake switch, USB charging, and a 10 pin ZIF connector to hook up to the screen.
For about 6 months, I worked as a Liaison Engineer at ICON Aircraft. My job was to know the mechanical systems of the plane, and understand their design intent, in support of production. Planes are complicated, they have a lot of parts, and not everything always goes according to plan. So I analyzed manufacturing non-conformities, and issue a disposition for those non-conformities, allowing production to continue.
After operating as a Liaison Engineer I quickly moved on to the Mechanical Design Group, where I focused on weight and cost optimization of aircraft components.
This shot was taken just after takeoff from nut-tree airport.
I got to participate in an employee demonstration of the A5. A surprisingly hands on demonstration: with no prior training (and instructions from the pilot), I was able to fly over, land on, and take off from lake Berryessa. The A5 is designed to be as safe and intuitive as an aircraft can get, and as someone who has been behind the wheel (stick), I think ICON has hit that mark. Huge Thanks to Brett Davenport for demoing the aircraft for me.
The original design of the Rudder / Brake Pedal arms in the ICON A5 were fabricated from bent and welded chromoly tube, and were expensive and heavy. As a member of the mechanical design team, I was tasked with optimizing the cost and weight of the assembly, while maintaining functionality and aesthetics.
Given that in extreme situations the pedal arms could potentially be supporting the full leg strength of a pilot, and that they are a critical control component, it was important that the pedal arms be robust. They were designed as 7075-T651 machined aluminum, and analysis showed they could support several hundred pounds with a factor of safety of 8.
The final Rudder / Brake Pedal Assembly (Sans Pedals). Machined from all 7075-T651, with MIL spec Type III hard anodized finish, with formerly welded joints now threaded together and permanently secured with Loctite 271. This new design cut the weight of the assembly by 50%, and the overall cost by 80%.
From March 2015 to June 2017 I worked at Ekso Bionics, In Richmond California. As a Mechanical Design Engineer I worked on mechanical systems, with respect to human machine interface, biomechanics, ergonomics, and anthropomorphics. I worked on a variety of different projects, including research and development for military contracts, helping push for FDA approval of the medical device exoskeleton, and product development and testing for the industrial products. Designing exoskeletons was extremely challenging, but twice as rewarding. Watching my projects come to life to help others made me incredibly happy.
Probably the coolest "decoration" at Ekso is The Wall. Featuring both early prototypes, and the results of successful contracts, The wall shows off Ekso's history.
For my first year at Ekso Bionics, I held a position in the research and development group, working on a government contract to develop a performance enhancing exoskeleton. For this project, I focused on designing static conformal carbon fiber structures, and kinematically anthropomorphic joint structures. In addition to these design tasks, I also worked on system integration; combining individual models of structure, actuators, electronics, and soft-goods into one cohesive system.
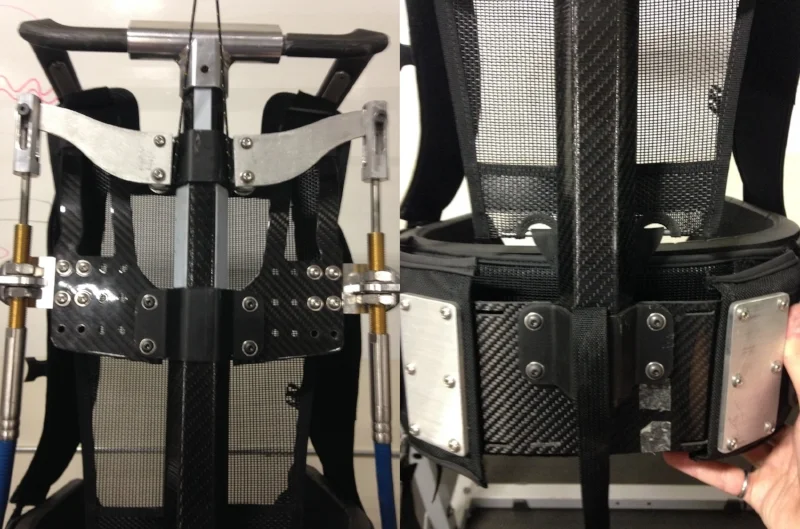
The chest and back shells (left) were constructed of vacuum bagged carbon fiber reinforced polymer, which I designed in SolidWorks using advanced surfacing techniques. The Challenge to these components was that they needed to house the batteries, electronics, and motor drivers of the system, while still leaving enough room for a solider's body armor underneath. Finding the right balance between allowing freedom of movement, and keeping the system from being too bulky required numerous iterations, which we accomplished via rapid prototyping techniques.
Some of the components in the system required protection from impact and the ingress of debris and liquid. On the right, is a custom made casing for the hip actuators which was 3D printed from a carbon reinforced polymer.
On the left is a better shot of the thigh brace, showing some of the soft-goods, and the vent holes cut into the brace. The vent holes improve the breathability of the component, improving the comfort of the pilot. On the right is the four bar linkage knee joint that I designed. Most people think of the knee as a simple hinge, in fact it is a complex rolling/sliding joint. This kinematic behavior can often be approximated with a four bar linkage. Designed out of machined aluminum, this joint needed to withstand the extreme forces generated by the legs of a running exoskeleton pilot (ground reaction forces often exceed 1400 newtons!), while still being light and conformal.
The shank spar (left) and the thigh spar (right), were constructed of the same vacuum bagged carbon fiber reinforced polymer as the chest and back shells. I designed them in SolidWorks using advanced surfacing techniques, with the focus being optimized strength to weigh ration, and the interface between the braces and mechanical components. The braces were 3D printed from a carbon fiber reinforced polymer, based off of body scans of the intended users; these components were form fitted to the exoskeleton pilots. The purpose of the braces was to interface between the exoskeleton pilot, and the structural elements, providing a firm connection between pilot and exoskeleton.
After a successful completion of that first government contract, I moved on to another government contract. This project was focused on creating an Ultralight load bearing exoskeleton, capable of assisting soldiers in carrying heavy packs. A soldier's "assault load" (the mission essential gear needed to fight, as well as the gear required to survive on a mission), can often exceed 100 pounds, resulting in a high rate of musculoskeletal injuries to the back. Our team's goal was to help alleviate that load, thereby lessening the possibility for injury. The system consisted of three major parts: soft-goods/HMI (not shown), ground reactor, and load structure. The soft-goods/HMI consisted of form fitting tights, that integrated closely to the load structure, providing a confortable interface for the opperator. The load structure consisted of a carbon fiber reinforced polymer frame, coupled with push pull control cables, which routed the load around the opperator and down to the ground. The ground ractor consisted of a custom modified pair of shoes which interfaced with the load structure, shunting the weight of a pack down to the ground, while still allowing for the complex movement of the walking cycle. For this project, my primary responsibilities were development of the load structure and acting as a test pilot to evaluate system performance.
The load structure consisted of three main parts: the yoke (discussed ealier), the push/pull cable attachment, and the HMI. These three components were coupled using a series of nesting hexagonal tubes, preventing rotation but allowing linear translation (via low profile PTFE plain bearings) on a single axis. Linear translation allowed relative motion of the push/pull cables which was required for the proper function of the ground reactor. The inner hex tube was connected directly to the yoke, and coupled to the middle tube via an overload prevnetion mechanism. The middle hex tube contained the overload prevention mechanism (hidden inside), which allowed the yoke to be overloaded from the designated payload, shunting overload to the opperator while still supporting the prescribed load. The outer tube and the middle tube were connected only by the hex tube plain bearings, and were allowed to freely move in relation to one another. Connected to the outer tube was a backpack-like suspension mesh HMI, and the casing of the push pull cables. The HMI frame consisted of a suspension mesh, which provided support while maintaining maximum breathability, and a hip belt to better secure the system to the user. Connection the casing of the push-pull cables to the load structure frame was important because it provided support to the cables, preventing them from buckling. At the completion of the project, we had designed a system the could offload up to 75% of a soldiers payload, and only weighed 13 pounds.
One of the most important parts of the load structure was the "yoke", which served the purpose of supporting a payload (typically in the form of a backpack and body armor). This component was particularly challenging due to various factors: the complex shape, the high cantelevered load , and the optimizing of strength to weight ratio. I designed the component in SolidWorks using advanced surfacing techniques, to be as low profile and conformal as possible, while still supporting the weight of the payload and not shunting the load directly onto the exoskeleton pilot. Optimizing the strength to weight ratio was accomplished using finite element analysis, using techniques to calcualte the low end of the stength potential. True layered carbon fiber FEA was time prohibitive, as the walls of the yoke tube were relatively thick (approximately 10mm), and the shape was complex. Despite these challenges, I was able to work with our supplier to detail ply direction based on the loading conditions in different areas of the component. The part was manufactured using a two part mold and a foam core, which I helped the supplier design using SolidWorks mold tools. When all was said and done, the yoke was strong, light, and capable of supporting our designated payload.
One of the deliverables of the project was to complete a 3 mile march, and report on things like comfort, effort, ease of use etc.
With the successful completion of two government R&D contracts under my belt, Ekso ran out of government contracts to work on, and so, I changed departments from the Ekso Labs group to the Ekso Works group. The Ekso Works group focuses on developing solutions for the industrial and commercial workspaces, with their flagship product being the Aerial/Scaffold mounting system. This product provides a mount for the Ekso ZeroG gravity balance arm on aerial work platforms or scaffolding, allowing workers to support and manipulate tools weighing up to 36 pounds with little to no effort. In my time with the Ekso Works group I focused on product design, machine design, and test program management.
One of the important features for the mount system, as designated by the product manager, was a mechanism to "dock" the ZeroG arm, thereby preventing it from flailing around while not in use. While we did have a legacy design for a safety latch, it was expensive (~$200) and not very robust. I was charged with developing a solution to this problem. After a few weeks of racking my brain, and not coming up with any solutions, I was in a casual conversation with a colleague, discussing the difficulty of the problem. Without even thinking about it, I said "The old design is basically a super expensive carabiner". Bingo. I immediately went to the machine shop and started prototyping the concept. Because we didn't have any suitable wire bending equipment, I had to litterally smith the main body; heating it red hot with a blow torch, then forming it with a hammer and vice. After a few hours, I had a fully functional proof of concept. I spent the next month researching, prototyping, designing, and testing. The result: a new safety latch that cost only $8 at quantity, and was incredibly robust in the harsh environment the product was meant for (construction). When I think about it, I've worked on much bigger, much more complex products, and this safety latch was such a small, simple, cheap thing, but for some reason it stands out as something I'm extremely proud of.
The concept for the docking latch was a total “Eureka!” moment. I had to run into the shop and build a prototype. Using only a blowtorch and a hammer, I was able to build a prototype in just under an hour.
Another important feature of the system was the interface between the ZeroG arm and the mount system. This component, referred to as the base link, was required to support a torque of over 200 newton meters (while turning smoothly), and withstand the brutal constuction environment. To tackle this challenge I went through numerous iterations, using a 3D printer and off the shelf components. The shaft is retained in the blind housing using a clever combination of a retaining ring nand shoulder bolt with a washer (the shoulder bolt is installed through a hole in down the center of the shaft). The shaft rides on a pair of high load needle roller bearings which react the torque while providing smooth motion (and a low profile). The bearing housing is sealed with a square profile o-ring, preventing dust and liquid ingress and protecting the bearings (while being resistant to the caustic substances it can be exposed to in the construction industry). Finally, a set screw seals up the bore through then central shaft resulting in a fully sealed, smooth rotating, robust final product.
After completing the previous design projects, I took on managing the test program for future developments of the ZeroG Arm. This included designing new test stands, as well as planning, scheduling, and writing test procedures and documentation.
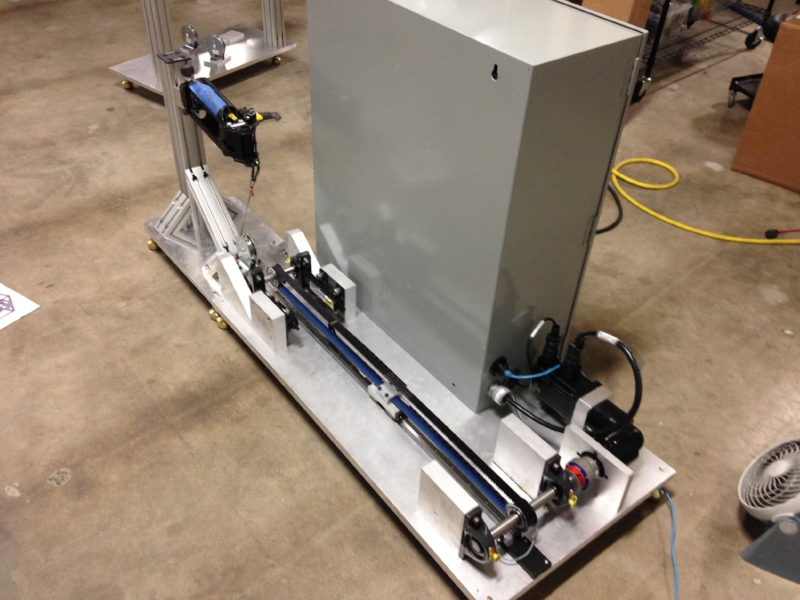
The ZeroG arm was originally designed to balance the weight of large cameras for the movie industry, but Ekso Bionics saw a big opportunity in construction environments. Going from a relatively mild environment to a decidedly harsh environment precipitated the need to rigorously test a wide variety of conditions and components. It was for these reasons that I designed what I called the test stand driver: a modular, servo driven, prime mover with force, position, and speed feedback. The test stand driver allowed the design of numerous modules that attach on to it, preventing duplication of effort when designing test stands. With a prime mover that already has every feature we could need for out tests, the design of all the various test stands became much quicker and easier. The mechanical side of the test stand driver consists of a servo motor, which turns a poly-chain pulley, and the belt that rides on said pulley is attached to a carraige on a linear rail. The belt-carraige combination provides linear motion, by means of a steel cable, which is attached to an in-line load cell, which is attached to the carraige. The other end of the steel cable runs out of the test stand driver, to the attached test module, where it is routed over pulleys to provide motion to the arm.
This is what it does, all day.
Here's a shot of the carraige in action, you can even see the cable carrier, which keeps the load cell wires from getting all tangled up. The test running in this animation is on the slow side, and the total travel is quite low. The 1 kilowatt servo motor (with a 10:1 gearbox) can drive the carraige at full load up to 92 centimeters per second, with a linear travel of 92 centimeters.
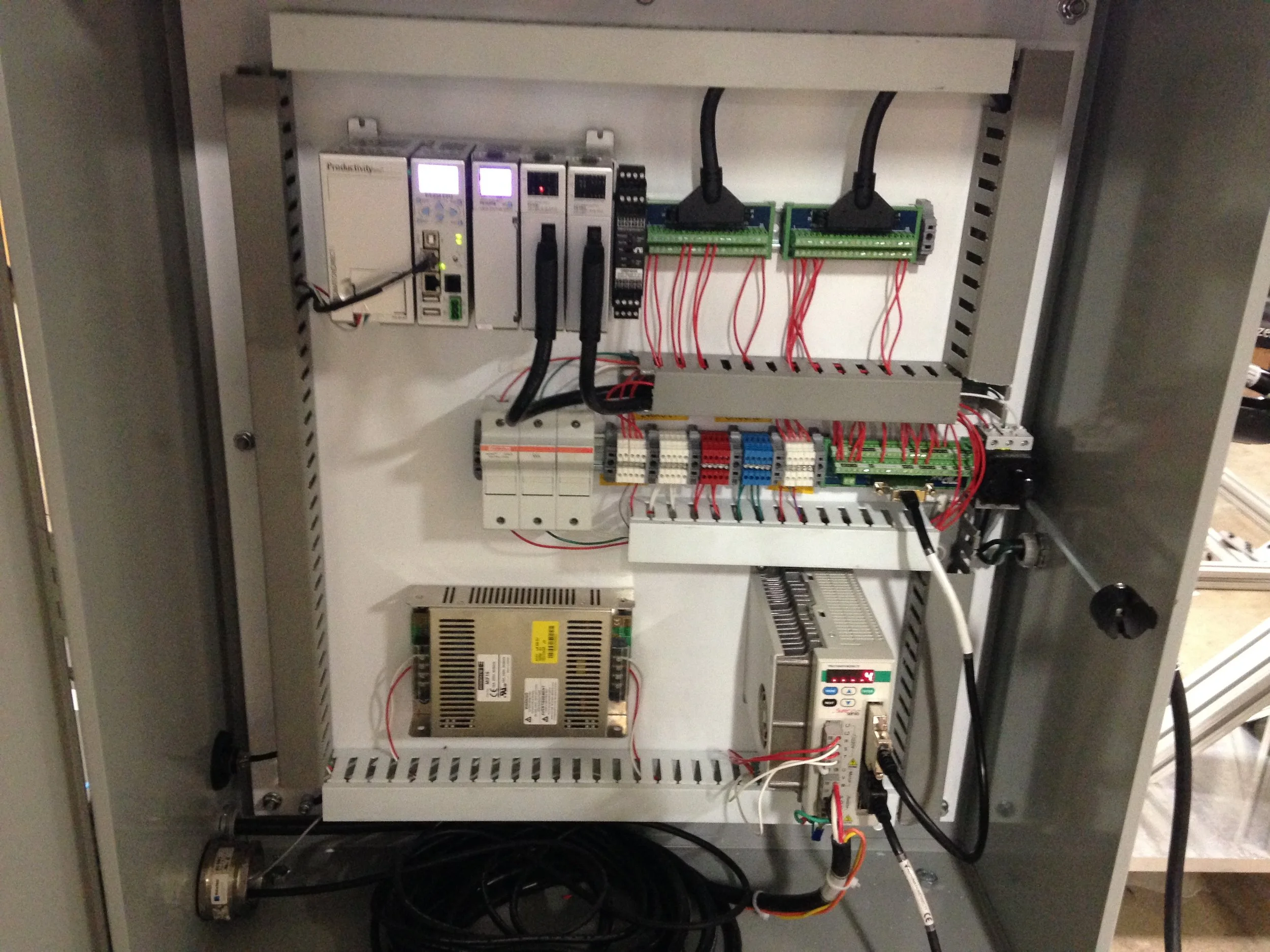
This is the interior of the electrical box for the test stand driver, again, designed and built by me. The 240V power, comes in through a cable grip in the side of the box then passes through a power conditioner,then through a disconnect switch, then through a three terminal fuse holder, then to terminal blocks to be distributed throughout the system. The "brain" of the system is the Productivity3000 programmable automation controller (top left), which includes: the CPU, an analog signal reader for he load cell, a high speed pulse ouput for the servo motor controller, and a high speed pulse input to read the encoder off the motor. Just to the right of this (small black box) is an amplifier for the load cell. On the bottom right is the servo motor controller, which interprets signals from the programmable automation controller, and drives the motor accordingly. The programmable controller and the motor controller are connected via zip-link terminal blocks (long green blocks), which provide an easy wiring solution for products with a large number of terminals. This setup was programmed using the productivity suite software, which uses ladder logic, but also provides advanced functions for automation products such as servo motors.
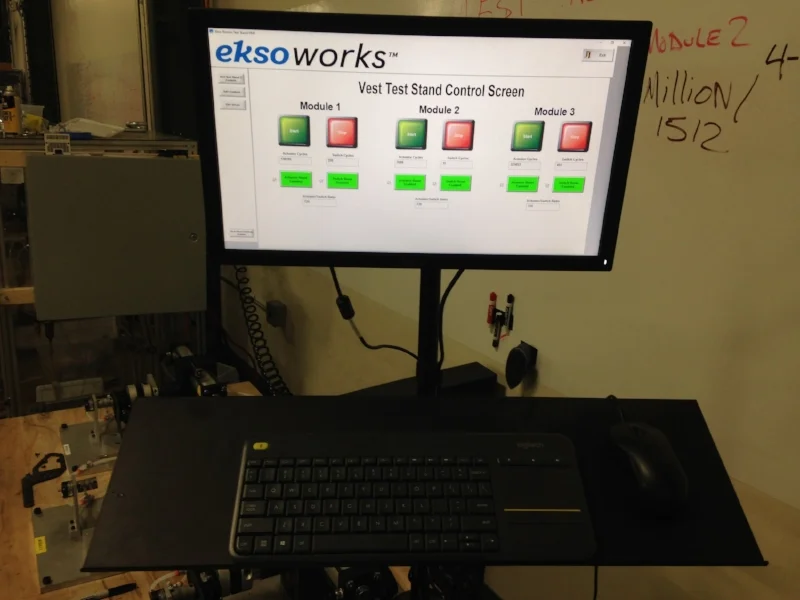
All the test stand at ekso bionics (4 total), are connected to a central HMI computer via ethernet. This computer runs Point-of-View HMI/SCADA software, giving engineers and technicians a user friendly interface from which to control test stands. Networking PLCs/PACs was a totally new experience for me, but I love a challenge!
From July 2011 to October 2014, I worked at UTC Aerospace systems. The site I worked at in particular (not shown) specializes in military and commercial egress systems, driven by explosives. As a manufacturing (Mechanical design) engineer, I designed tooling and machinery to increase efficiency and safety, and generally promote a continuously improving manufacturing environment. I'm proud of many of the things I did while working there, but the most notable achievement was when I successfully alleviated ergonomic issues associated with loading one of our products, and inadvertently increased the process speed at the same time. Unfortunately, everything on site was very tightly ITAR controlled, and I wasn't allowed to keep any photos for my portfolio. If you want to chat about the kinds of things I designed there, feel free to contact me!
In December 2016 I graduated from California State University Sacramento, where I completed my M.S. in mechanical engineering. My research field is human enhancement via robotic exoskeletons, and I am ravenous for all research papers concerning kinematics, ergonomics, anthropomorphism, human machine interaction, low weight high force actuation, and programming. My thesis was on the endurance life of twisted string actuators, and can be found in the "About" section.
In the Fall of 2017, I returned to CSUS to teach for a semester. I taught Dynamics and Intro to Engineering Design. It was fun, and I really enjoyed connecting with young people excited about technology, but I think my strengths lie in solving problems, not handing them out.
I graduated from University of the Pacific with a B.S. in mechanical engineering, where I focused on robotics and human machine interaction. My senior project at pacific was a powered exoskeletal arm that enhanced the wearers strength, this project won me and my team second place in the design competition.
University of the Pacific has a beautiful campus, located in Stockton, Ca.
I was the mechanical engineer on my senior project "Powered Human Exoskeleton", and convinced my adviser to allow a cross discipline project, the first ever at pacific.
These are my teammates, who developed the mechatronics and firmware for the project.
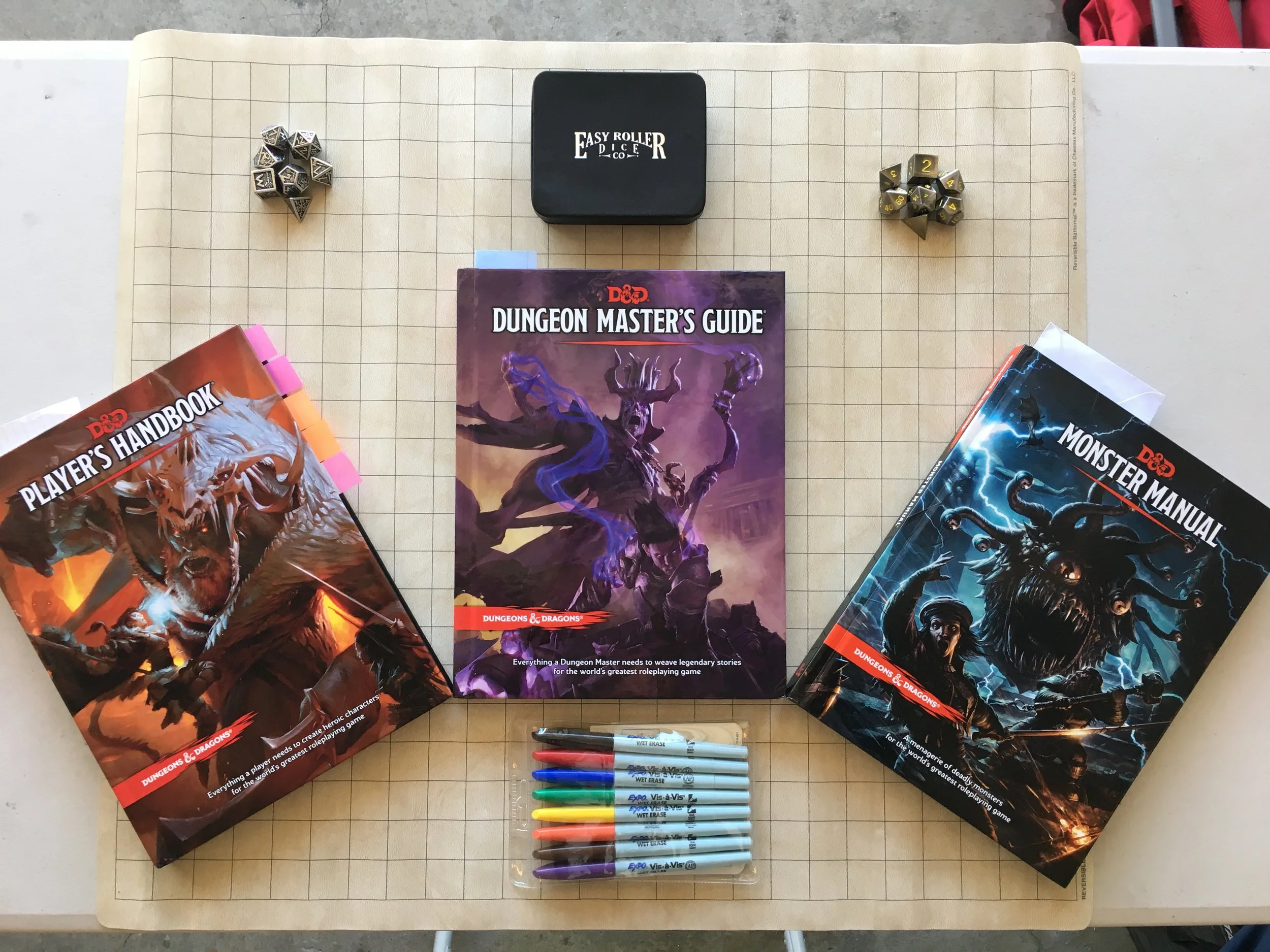
One of my hobbies, which I have zero time for, is dungeon mastering for dungeons and dragons games. I love the creativity it allows me, and I love seeing the creativity of others intertwined with my own.
The player's handbook, the dungeon master's guide, the monster manual, two sets of metal dice (nice and heavy), dice box, wet erase markers, and a battle mat.
I've been singing and playing guitar for about 20 years. I'm not nearly as good as I should be. I used to write music, but adult life doesn't really lend itself to good lyrics the way an angsty college experience does.